

понедельник, 26 ноября 2012 г.
среда, 14 ноября 2012 г.
GPS трек
В ноябре в Новосибирске традиционно наступает зима и полеты медленно сходят на нет. Наступает время устранять старые баги и конструировать новые ;)
Одним из таких багов был не работающий вывод GPS трека в EzOSD. Покопался в один из вечеров и оказалось все достаточно банально: распайку на выходе с OSD сделал неверно. Устранил. Теперь из динамиков слышен звук как от пулеметной очереди - это передаются координаты GPS:
Полет можно просматривать также в Google Earth с помощью утилиты ImmersionRC Player или же открыть сгенерированный плеером *.kml файл, где записан полный маршрут пути.
Есть также возможность вывода траектории во время полета (Live capture) на ноутбуке, iPhone, iPad, or iPod Touch: iTelemetryFPV
Точность определения координат оказалась невысока, однако по-видимому это связано с сильной облачностью, шел снег и день был пасмурный. В результате GPS датчик поймал лишь 6 спутников. С обновленной прошивкой и новым датчиком точность должна значительно улучшиться: http://fpvlab.com/forums/showthread.php?5051-TBS-EzOSD-the-EzOSD-just-got-better
В общем, я рад, что не ошибся с выбором OSD. Система ImmersionRC EzOSD реально очень продуманная и удобная.
Остался вопрос: в файле *.kml прописана также высота полета. Она же отображается при выводе точек на карте Google Earth, в результате чего точки визуально смещаются относительно карты при ее смещении. Как сделать так, чтобы точки лежали непосредственно на поверхности карты (clamped to ground)? Редактировать высоту точек по одной очень уж утомительно :)
Одним из таких багов был не работающий вывод GPS трека в EzOSD. Покопался в один из вечеров и оказалось все достаточно банально: распайку на выходе с OSD сделал неверно. Устранил. Теперь из динамиков слышен звук как от пулеметной очереди - это передаются координаты GPS:
 |
| snapshot |
Точность определения координат оказалась невысока, однако по-видимому это связано с сильной облачностью, шел снег и день был пасмурный. В результате GPS датчик поймал лишь 6 спутников. С обновленной прошивкой и новым датчиком точность должна значительно улучшиться: http://fpvlab.com/forums/showthread.php?5051-TBS-EzOSD-the-EzOSD-just-got-better
В общем, я рад, что не ошибся с выбором OSD. Система ImmersionRC EzOSD реально очень продуманная и удобная.
Остался вопрос: в файле *.kml прописана также высота полета. Она же отображается при выводе точек на карте Google Earth, в результате чего точки визуально смещаются относительно карты при ее смещении. Как сделать так, чтобы точки лежали непосредственно на поверхности карты (clamped to ground)? Редактировать высоту точек по одной очень уж утомительно :)
четверг, 18 октября 2012 г.
Полеты без акселерометра
Сегодня первый раз полетал FPV без акселерометра в районе горнолыжного спуска на Горской. Трикоптер управляется легко, никаких проблем. Рефлексы как на вертолете. При разгоне также никаких проблем, хоть под 45 градусов пикируй, не нужно бороться с глупой микросхемой (см. видео). Ранее, при полетах с акселем, после таких энергичных полетов он начинал тянуть назад.
Почему я не сделал этого раньше?!!
вторник, 18 сентября 2012 г.
Наземная станция
 |
| Общий вид |
В настоящий момент в наземной станции для FPV полетов используется следующее оборудование:
- Приемник видео на 1.3 Ггц с обновленным SAW фильтром
- Видеоочки Fatshark RCV922 BASE Edition (640x480 VGA)
- Пишущий на SD карту видеоплеер Mini D1 quality SD card video recorder- Cased (max. 704x576)
- Блок для распределения питания и видеосигнала PowerBoxAV Audio Video and Power Distribution Box
- 2 мини ампер-вольтметра In-Line Voltage and Amperage Meter для отображения состояния аккумуляторов наземной станции
- 2 аккумулятора Rhino 4900mAh 3S1P 11.1v 20C Lipoly Pack для питания станции
- Переносной телевизор PROLOGY (диагональ 7 дюймов, 480x234)
 | |||
| Подробно |
 |
| Компоновка |
Антенны круговой поляризации для видео транспортируются на место полетов в пластиковых банках, во избежание повреждений:
 |
| Антенны в банках ;) |
вторник, 4 сентября 2012 г.
Трикоптер-шпион
Провел фотосессию дачных участков с помощью трикоптера и камеры GoPro.
Управление было визуальное, я на стиках, сосед по даче в очках подавал команды
куда сместить трикоптер, чтобы получить хорошее изображение.
Камера была установлена в режим видео r5=1080 p (FullHD) 25 кадров/с. При этом на изображении проявляется "эффект желе" из-за вибраций. Фотографии все же получились довольно интересные:
Один раз поднял трикоптер так высоко, что потерял ориентацию. Пока опускал его пониже,
он немного дрейфовал по ветру и вращался. К счастью, когда трикоптер спустился до высоты чуть выше домов, ориентацию удалось распознать и посадить без повреждений. Уфф...
Смотрим:
P.S. Ориентацию модели в воздухе можно распознать, покачивая модель по элеронам. Если модель отклоняется в фазе со стиками - хвостом к себе, если в противофазе - кабиной к себе.
Управление было визуальное, я на стиках, сосед по даче в очках подавал команды
куда сместить трикоптер, чтобы получить хорошее изображение.
Камера была установлена в режим видео r5=1080 p (FullHD) 25 кадров/с. При этом на изображении проявляется "эффект желе" из-за вибраций. Фотографии все же получились довольно интересные:
 |
| низко |
 |
| высоко |
он немного дрейфовал по ветру и вращался. К счастью, когда трикоптер спустился до высоты чуть выше домов, ориентацию удалось распознать и посадить без повреждений. Уфф...
Смотрим:
P.S. Ориентацию модели в воздухе можно распознать, покачивая модель по элеронам. Если модель отклоняется в фазе со стиками - хвостом к себе, если в противофазе - кабиной к себе.
воскресенье, 12 августа 2012 г.
Наши дачи
Показал соседу по даче FPV трикоптер. Сосед в очках, я за стиками.
На видео видно довольно много помех из-за интерференции с видеосигналом, отраженным от домиков (multipath interference), так как на передатчике и приемнике антенны пока стоят линейной поляризации.
На видео видно довольно много помех из-за интерференции с видеосигналом, отраженным от домиков (multipath interference), так как на передатчике и приемнике антенны пока стоят линейной поляризации.
суббота, 4 августа 2012 г.
Тест FPV антенн
Провел небольшой тест различных антенн с передатчиком на 100 мВт, частота 1320 МГц. Управление визуальное, не по очкам. Носитель FPV - летающее крыло Tek Sumo.
На передатчике (TX) тестировались антенны:
На приемнике (RX) тестировались антенны:
На передатчике (TX) тестировались антенны:
На приемнике (RX) тестировались антенны:
- полуволновый монополь (стоковая)
пятница, 15 июня 2012 г.
Летающее крыло Tek Sumo
Крыло меня радует.
Затрат минимум, а удовольствия море.


Настройки минимальны, главное правильно выставить центр тяжести.
В моем случае ЦТ 22 см от носа (с батареей Rhino 3S 1050 mAh, догружал монетой 50 евроцентов).

Разбивал крыло в хлам, практически отрывал крылья - ремонтируется из любого состояния эпоксидной смолой. Циакрином материал EPP не клеится.

Может летать как быстро, так и планировать. Очень рекомедую.
Затрат минимум, а удовольствия море.
Настройки минимальны, главное правильно выставить центр тяжести.
В моем случае ЦТ 22 см от носа (с батареей Rhino 3S 1050 mAh, догружал монетой 50 евроцентов).
Разбивал крыло в хлам, практически отрывал крылья - ремонтируется из любого состояния эпоксидной смолой. Циакрином материал EPP не клеится.
Может летать как быстро, так и планировать. Очень рекомедую.
- Hobbyking Teksumo EPP Wing 900 mm (ARF)
- TURNIGY Basic 25A v3.1 Speed Controller
- Hobbyking 2818 Brushless Outrunner 1350KV
- Master Airscrew propeller 7x4 (Pusher)
- OrangeRx R610 Spektrum DSM2 6ch 2.4Ghz Receiver (w/ Sat Port)
- Turnigy TG9e 9g / 1.5kg / 0.10sec Eco Micro Servo
- Rhino 1050mAh 3S1P 30C Lipoly Pack
понедельник, 7 мая 2012 г.
Я его нашел!
До рези в глазах просматривал на медленной перемотке последние кадры, снятые с трикоптера, в надежде понять, куда он все-таки приземлился. Удалось понять вот что. Первое, и самое главное, среди шумов последних кадров можно разглядеть, что трикоптер приближается к небольшой поляне.

Это значительно увеличивает шансы на успех, так как если он сел в бурелом, найти его будет значительно сложнее.
И второе, если обойти кусты сбоку, вдоль озера, то с обратной стороны есть обширные поляны с выжженой травой.
Именно туда мы пытались проехать на машине. Почти все поляны соединяются между собой, так что продираться сквозь бурелом совсем не обязательно. Если пользоваться правилом правой руки (как для выхода из лабиринтов), то есть идти все время вдоль правой стенки кустов, то можно обойти почти все поляны. Пытался даже по форме поляны на последних кадрах понять в каком месте она находится. Но все-таки видимая форма сильно зависит от ракурса. Снятая вблизи, при посадке, и снятая с большой высоты одна и та же поляна могут выглядеть совершенно по-разному.
Далее, установил на крыло Tek Sumo камеру Turnigy

и взял ноутбук для просмотра снятого с воздуха видео, а также прихватил совершенно необходимые в этих местах компас и болотные сапоги. Приехав на место, решил сначала отпраиться в пешую поисковую экспедицию, так как ветер был сильный даже для крыла. Как и планировал, обошел кусты с обратной стороны, перебрался через пару каналов, прошел по болотам и вуаля!

Стоит посреди выжженого поля совершенно целый трикоптер! На ногах, на своих трех. Поиск занял минут 30. Радость моя была безгранична :)

Это ли не чудо, найти на площади 100000 кв. метров трикоптер! Иголка в стоге сена!
Вскрытие черных ящиков немедленно показало причину сбоя видеосвязи: отломилась верхняя половина дипольной антенны

Возможно, из-за того, что антенна расположена вблизи вращающегося пропеллера, потоки воздуха все время сгибали-разгибали ее и в конце-концов она отломилась (сделана из медной проволоки диаметром 1 мм). Это привело к резкому и очень сильному ухудшению видеосвязи. Аккумулятор, конечно испортился, так как передатчик работал до последнего, но в остальном все работает. После такого стресса я, пожалуй, сделаю перерыв в полетах :)

Это значительно увеличивает шансы на успех, так как если он сел в бурелом, найти его будет значительно сложнее.
И второе, если обойти кусты сбоку, вдоль озера, то с обратной стороны есть обширные поляны с выжженой травой.
Именно туда мы пытались проехать на машине. Почти все поляны соединяются между собой, так что продираться сквозь бурелом совсем не обязательно. Если пользоваться правилом правой руки (как для выхода из лабиринтов), то есть идти все время вдоль правой стенки кустов, то можно обойти почти все поляны. Пытался даже по форме поляны на последних кадрах понять в каком месте она находится. Но все-таки видимая форма сильно зависит от ракурса. Снятая вблизи, при посадке, и снятая с большой высоты одна и та же поляна могут выглядеть совершенно по-разному.
Далее, установил на крыло Tek Sumo камеру Turnigy

и взял ноутбук для просмотра снятого с воздуха видео, а также прихватил совершенно необходимые в этих местах компас и болотные сапоги. Приехав на место, решил сначала отпраиться в пешую поисковую экспедицию, так как ветер был сильный даже для крыла. Как и планировал, обошел кусты с обратной стороны, перебрался через пару каналов, прошел по болотам и вуаля!

Стоит посреди выжженого поля совершенно целый трикоптер! На ногах, на своих трех. Поиск занял минут 30. Радость моя была безгранична :)

Это ли не чудо, найти на площади 100000 кв. метров трикоптер! Иголка в стоге сена!
Вскрытие черных ящиков немедленно показало причину сбоя видеосвязи: отломилась верхняя половина дипольной антенны

воскресенье, 6 мая 2012 г.
Как я потерял трикоптер
В районе искусственных озер и каналов около Кудряшевского бора на первом же аккумуляторе потерял трикоптер в результате сбоя видеосвязи.
Был довольно сильный ветер, трикоптер сносило ветром от канала. Cадил его уже вслепую. Как оказалось, местность, куда сел трикоптер, непроходимая: высокие кусты, а по сути настоящий бурелом метра 3-4 высотой, каналы метровой глубины, залитые водой и настоящее болото. Несмотря на помощь друга - рыбака, с которым мы приехали, найти трикоптер не удалось. Видно в этом буреломе буквально на пару метров вокруг себя, чуть зайдешь вглубь и становится трудно ориентироваться, направление полностью теряется. Приходилось постоянно продираться сквозь ветки. С высоты это место казалось не большим, на деле оказалось около 500 x 200 метров совершенно непроходимого бурелома:

Затем мы попытались объехать это место с противоположной стороны, так как с высоты я заметил, что там есть что-то похожее на дорогу. Проехав по этой "дороге" метров 50 мы сели на Jimny по самые оси. Ни вперед, ни назад, ни 4WD, ни понижайка. Приехали... Позвали на помощь ближайших рыбаков, откликнулись две машины. Минивэн сел сразу же, девятка проехала чуть дальше и тоже села. Девятку вытолкали впятером руками, минивэн пришлось поддомкрачивать, тяжелый он. Затем принялись за Jimny, поддомкратили все четыре колеса и вытолкали. В грязи по уши, и люди, и машины. Съездили в деревню, купили водки и пива, отблагодарили пацанов. Спасибо им, думал уже ночевать будем в болоте.
Ошибка в управлении трикоптером, я считаю, была только одна - поднялся на большую высоту в не совсем подходящей местности. Что произошло с видеосвязью не понятно. Помехи начались резко и очень сильные, при этом снижение трикоптера не улучшило видеосвязь. Не типичное поведение. Аккумулятор стоял нормальный, Rhino 2250 mAh, по последним видимым на OSD показаниям было 10.5 Вольт, этого вполне достаточно для устойчивой видеосвязи (проверял на просаженном аккумуляторе Turnigy). К сожалению, EzOSD не выводит GPS координаты постоянно в полете, а только в конце, Flight Summary. Иначе можно было бы попробовать поискать трикоптер с навигатором по последним видимым GPS координатам. Другой вариант - прицепить камеру на самолет и полетать над этой местностью. Прочесывать метр за метром эти болота, думаю, бессмысленно. В принципе, на кабине трикоптера написан мой телефон, но я думаю, что в такой местности его вряд ли кто-нибудь случайно найдет.
Мда, я думал вертолеты это самое дорогое хобби. Оказывается нет, особенно если вспомнить совсем еще недавно улетевший в море квадрокоптер от rcig с GoPro на борту http://forum.heli-nsk.ru/index.php?topic=587.0
четверг, 3 мая 2012 г.
Трикоптер: первые шаги в FPV
Полетал при довольно сильном ветре в поле за селом Новолуговое. Полеты выявили, что аккумулятор Turnigy 2200 mAh, интенсивно эксплуатировавшийся в прошлом году на вертолете HK450GT, пришел в негодность. В полете напряжение просаживается ниже 10 Вольт, о чем постоянно предупреждает OSD. На выброс. Садить трикоптер мягко достаточно сложно. Ветер ощутимо сдувает трикоптер на деревья, ближайшие к машине, постоянно приходится с ним бороться.
Улетал на 500 метров от места взлета, помех нет. Старался летать вдоль дорог, чтобы в случае падения трикоптера было проще его искать.
Поднялся на 150 метров, полюбовался видом:
Улетал на 500 метров от места взлета, помех нет. Старался летать вдоль дорог, чтобы в случае падения трикоптера было проще его искать.
Поднялся на 150 метров, полюбовался видом:
среда, 2 мая 2012 г.
Трикоптер: описание
Трикоптер существенно доработан.
Установлены:
{kind=link}
Установлены:
- плата Navi
- камера с сенсором Pixim TBS 69
- передатчик на 300 mW с сайта readymaderc.com с фильтром и дипольной антенной. Использую канал 1360 MHz в передатчике.
- EzOSD с датчиком тока
- 9-канальный приемник OrangeRX Spectrum DSM2 с двумя сателлитами OrangeRX satellite receiver
 |
| Общий вид |
 | |
| Вид сзади |
 |
| Вид спереди. Ближайшие к антенне приемника регуляторы завернул в фольгу во избежание помех. |
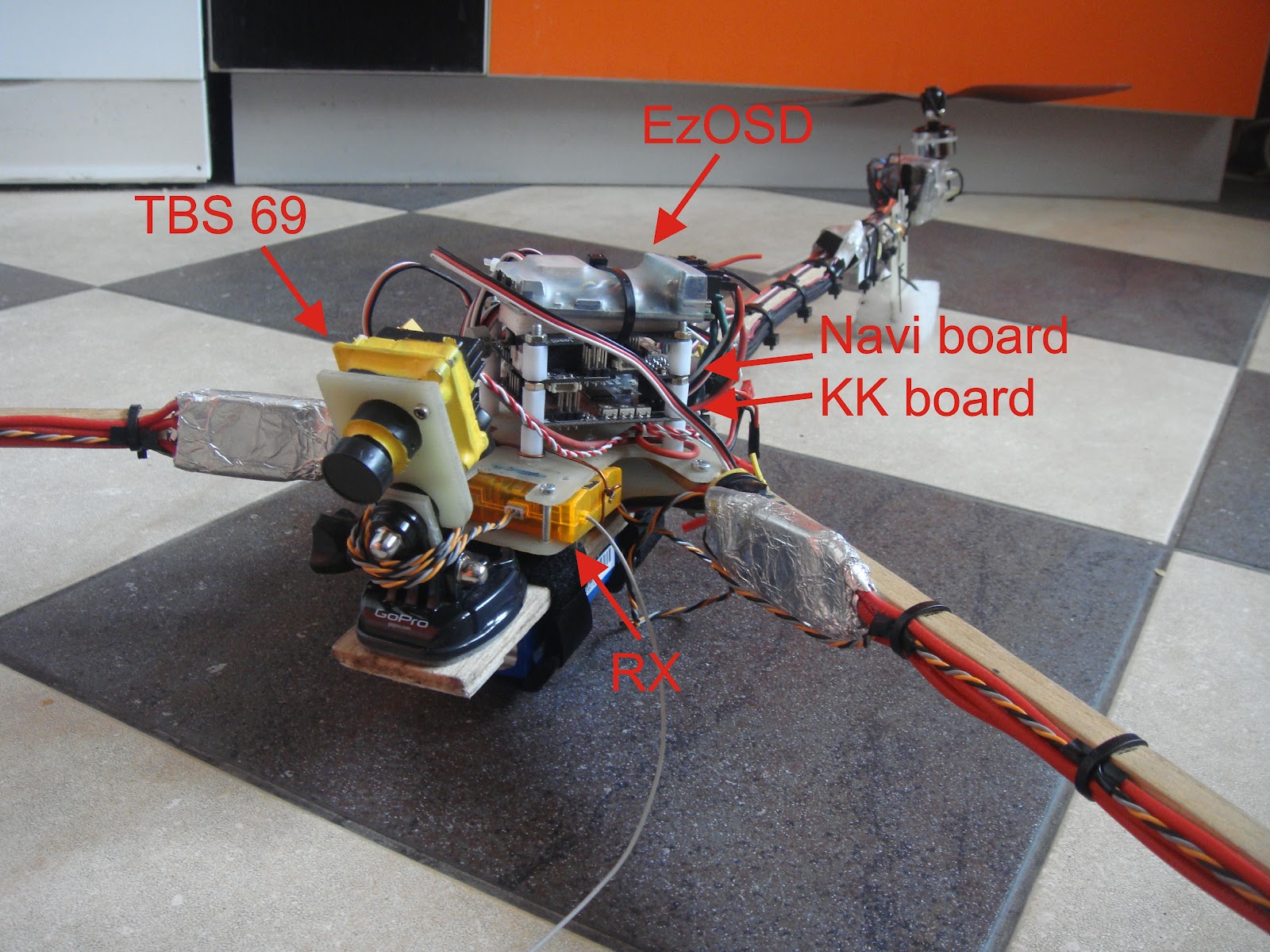 |
| Компоновка |
 |
| Компоновка |
 |
| Передатчик с дипольной антенной и поворотный узел. |
 |
| Поворотный узел с другой стороны. Собран на основе межлопастного вала и цапф от вертолета T-REX 450. |
 |
| На обоих передних лучах установлены сателлиты OrangeRX. |
понедельник, 26 марта 2012 г.
Рождение трикоптера
Наконец-то зарегистрировал свой блог, в котором собираюсь выкладывать все интересное, что происходит с моими летающими радиоуправляемыми моделями. Писать буду не часто, только когда появится что-то действительно интересное.
Итак, начнем. Некоторое время назад собрал трикоптер по материалам сайта http://rcexplorer.se. Немного полетал в поле. Замечательная машина, стабильная и плавная. Как раз то, что нужно для съемки видео с воздуха.
Лучи: 50 см, дерево
Мозги: KK (без акселерометров)
Приемник: OrangeRX DSM2
Двигатели: 2213N 800Kv Brushless Motor
Регуляторы: Turnigy Plush 18 A
Аккумулятор: Turnigy 25C 2200 мАч
Итак, начнем. Некоторое время назад собрал трикоптер по материалам сайта http://rcexplorer.se. Немного полетал в поле. Замечательная машина, стабильная и плавная. Как раз то, что нужно для съемки видео с воздуха.
Лучи: 50 см, дерево
Мозги: KK (без акселерометров)
Приемник: OrangeRX DSM2
Двигатели: 2213N 800Kv Brushless Motor
Регуляторы: Turnigy Plush 18 A
Аккумулятор: Turnigy 25C 2200 мАч
Подписаться на:
Комментарии (Atom)